
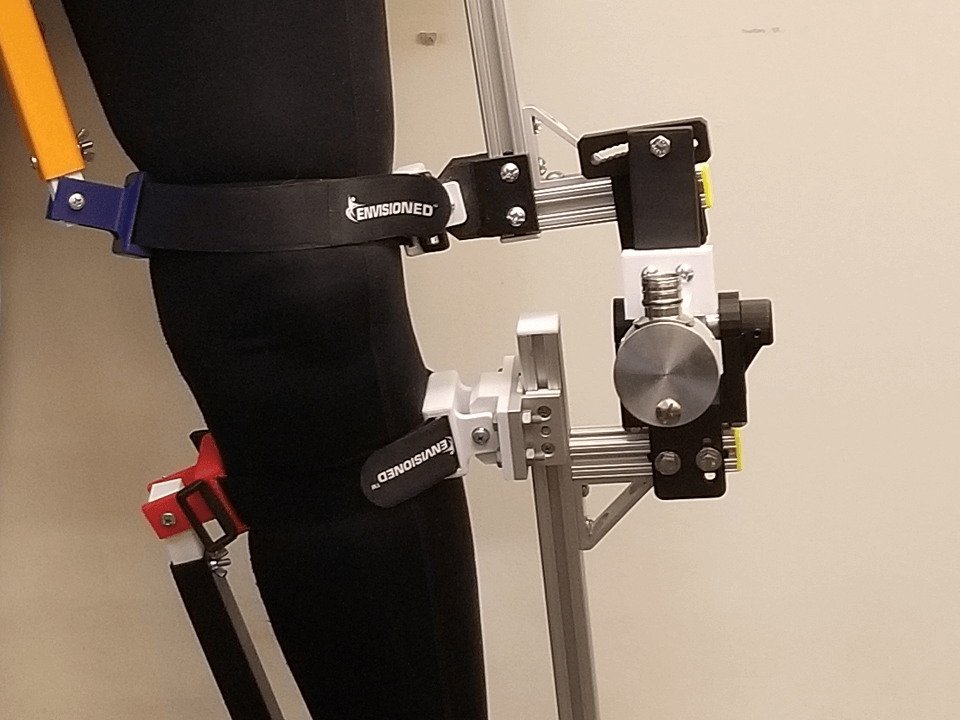
Neuromuscular retraining to relieve joint contact forces
Alteration of gait to minimize joint contact forces, thereby delaying the onset and slow down the progression of knee osteoarthritis.
Unfunded (ongoing)
Details and publications
कर्मण्येवाधिकारस्ते मा फलेषु कदाचन । मा कर्मफलहेतुर्भुर्मा ते संगोऽस्त्वकर्मणि ||To work, you have the right, but not to the fruits thereof. Let not the fruits of your labor be your motive, and may you never be without work.
Alteration of gait to minimize joint contact forces, thereby delaying the onset and slow down the progression of knee osteoarthritis.
Unfunded (ongoing)
Details and publications
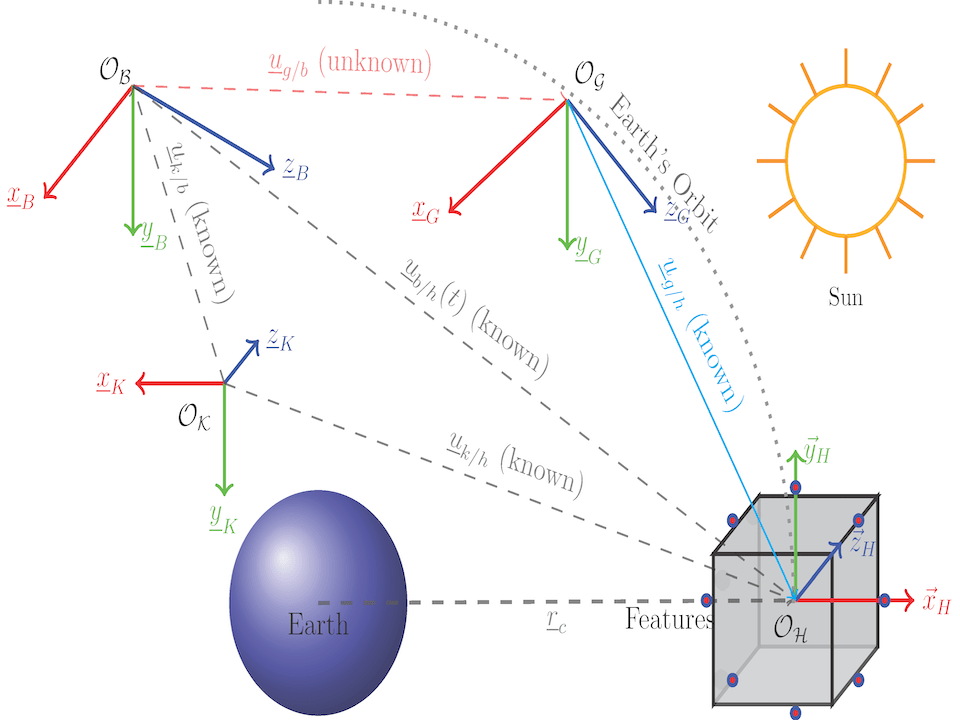
The primary objective of this project is to develop novel solutions to multi-agent learning and control problems in the aerospace domain by formulating them as output-feedback adaptive optimal control problems.
AFRL FA8651-24-1-0019 (ongoing)
Details and publications
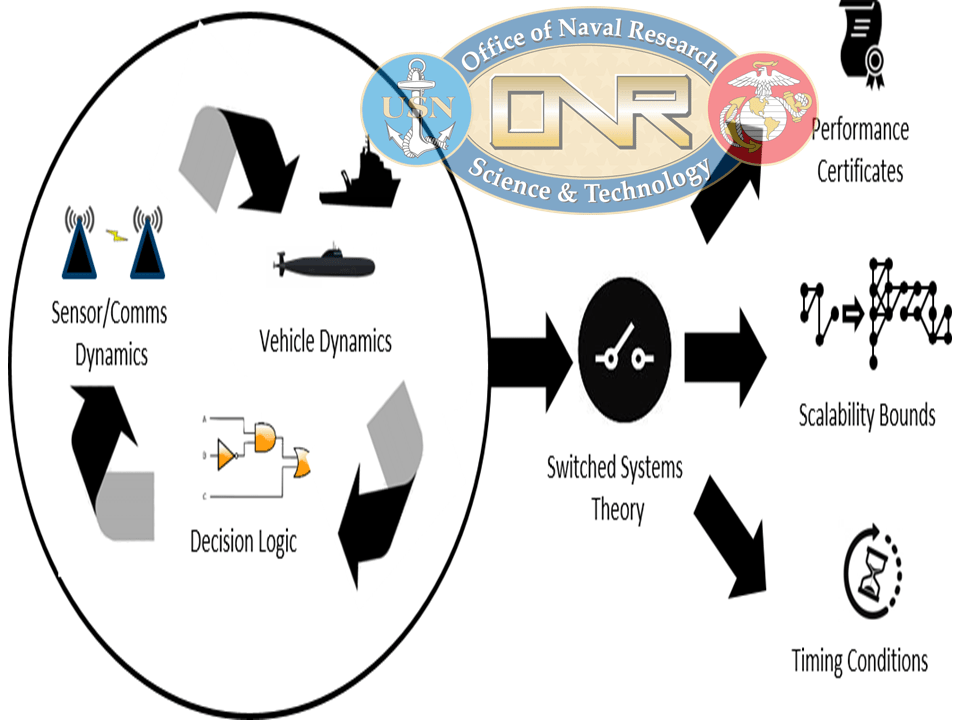
Online (i.e., real-time) adaptive optimal controllers for maritime systems that operate in complex environments where intermittent sensing and actuation render modern online optimal control methods unsuitable.
ONR N00014-21-1-2481 (completed)
Details and publications
This project developed computational methods for reinforcement learning in continuous-time dynamic systems.
ONR N00014-16-1-2091 (completed)
Details and publications
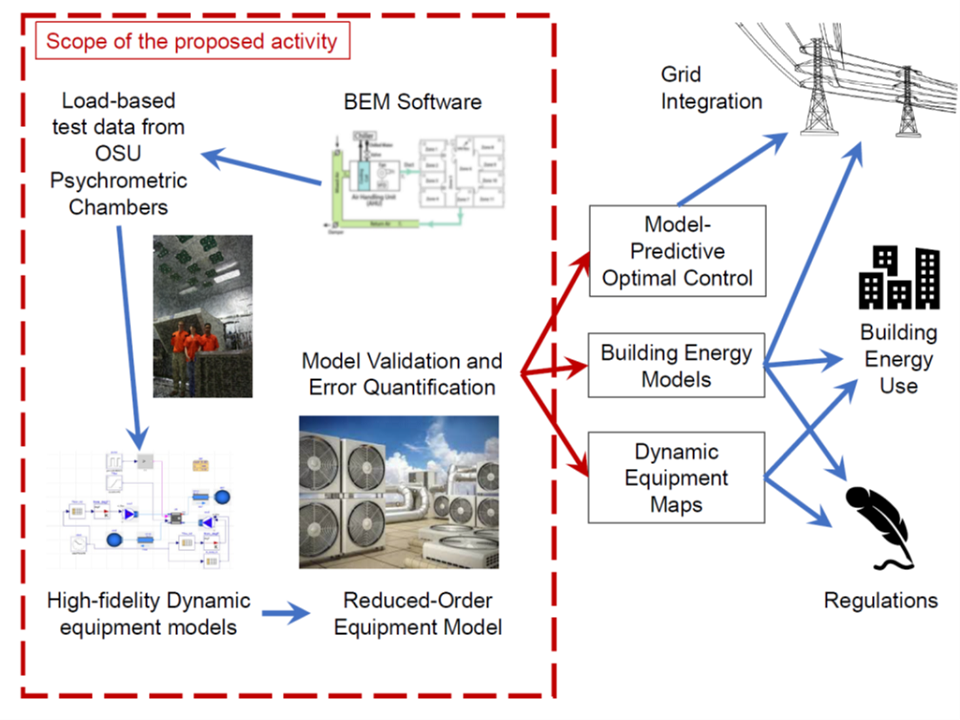
This project will focus on reduced-order modeling of HVAC units using both experimental research and first-principle model-based analysis.
OCAST AR41-042 (completed)
Details and publications
We seek the development of new operator theoretic kernel methods that can harness data obtained from black and gray box dynamical systems.
NSF 2027999 (completed)
Details and publications
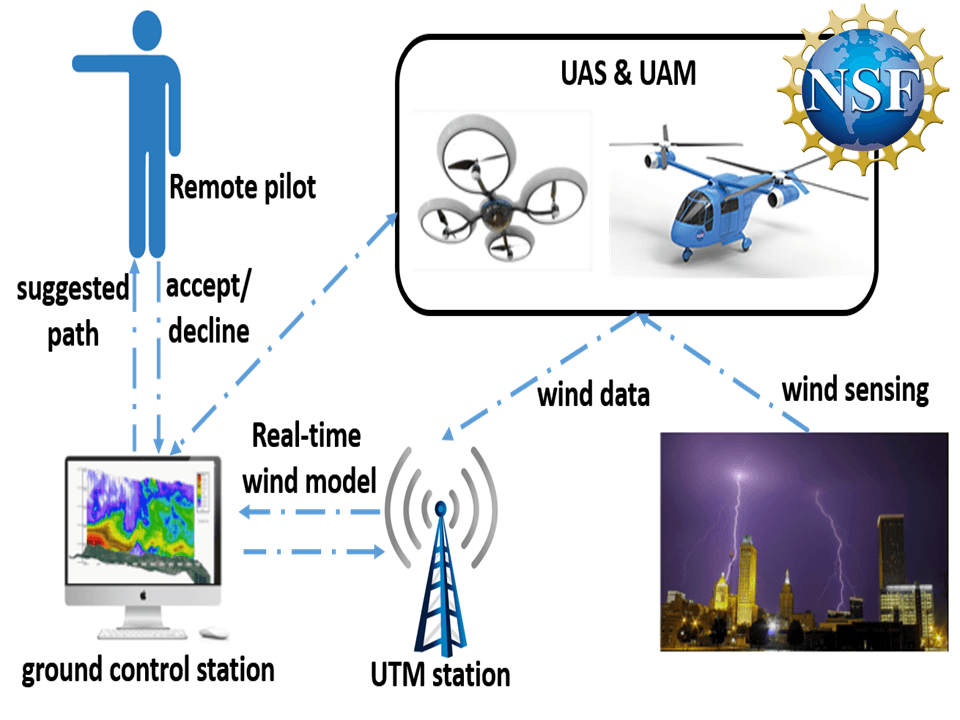
Development of theoretical and computational tools that enable prediction and exploitation of low-altitude gust information for autonomous aircraft operations.
NSF 1925147 (completed)
Details and publications
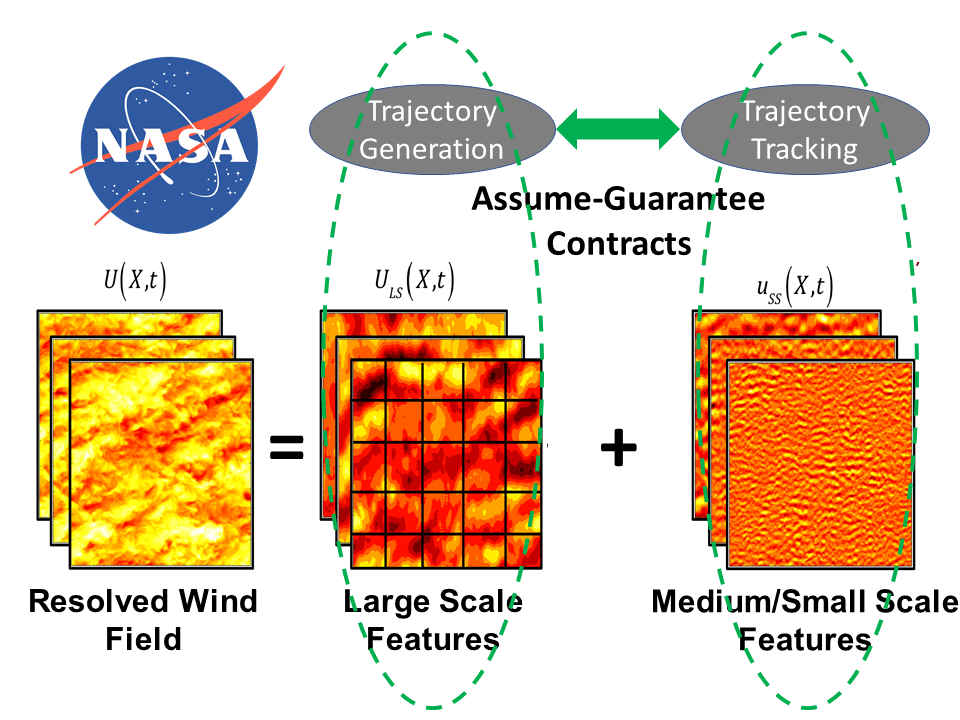
In this project we developed a hierarchical control architecture that exploited the spatiotemporal scale separation in the atmospheric boundary layer wind flow dynamics.
NASA - EPSCoR - RIG 2019-33 (completed)
Details and publications
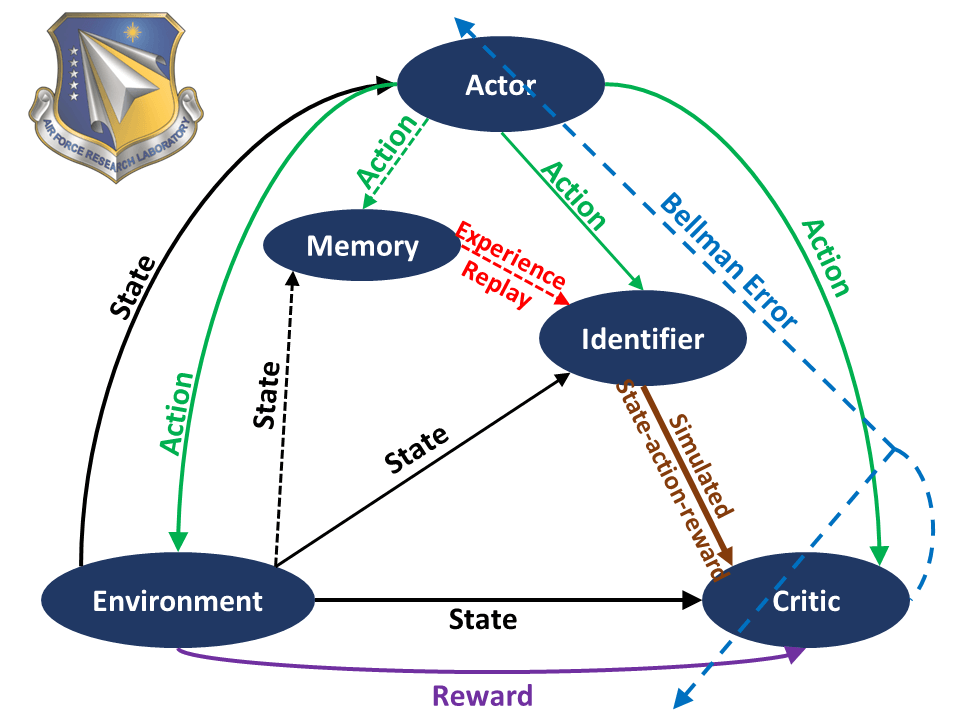
The objective of this project is to develop novel solutions to the multi-agent optimal decision making problem by formulating it as an output-feedback adaptive optimal control problem.
AFRL FA8651-23-1-0006 (completed)
Details and publications
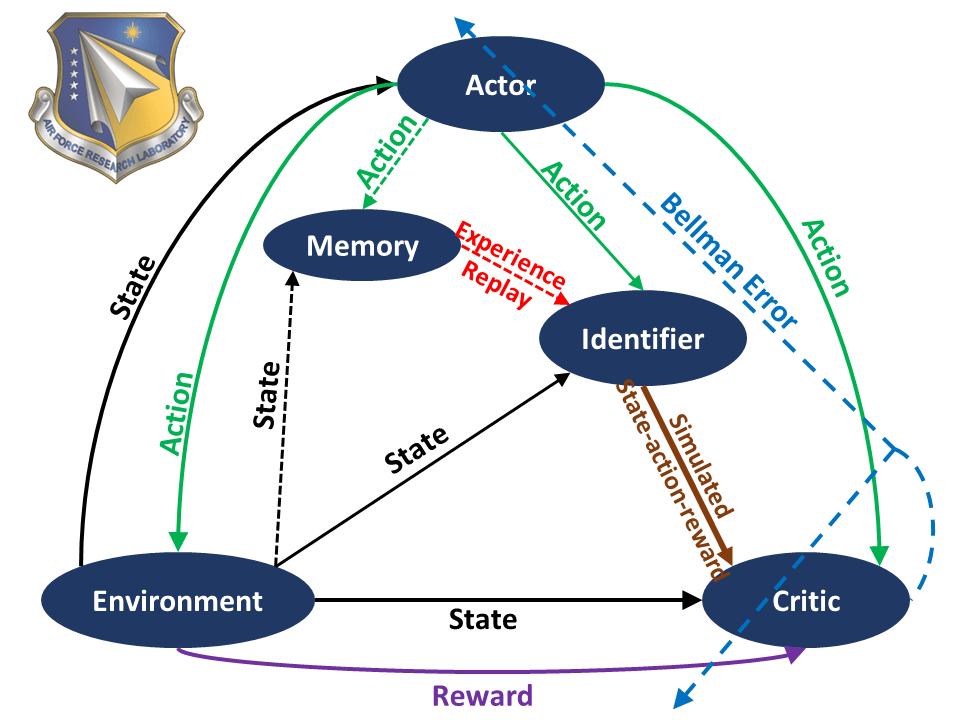
Methods for online real-time learning that are robust to modeling errors and abrupt changes in the dynamic models using a model-aware reinforcement learning framework.
AFRL FA8651-19-2-0009 (completed)
Details and publications
We are developing novel operator theoretic techniques for data and model-driven synthesis of control via control Lyapunov functions and solution of optimal control problems.
AFOSR FA9550-20-1-0127 (completed)
Details and publications