Occupation kernels and Liouville operators
Operator theoretic methods for data-driven identification, verification, and control synthesis.
Details and publications
अन्नदानं परं दानं विद्यादानं अतः परम् । अन्नेन क्षणिका तृप्तिः यावज्जीवं च विद्यया ॥Sharing food is a great deed, but sharing knowledge is even better; the satisfaction obtained from food is momentary, but that obtained from knowledge lasts a lifetime.
Operator theoretic methods for data-driven identification, verification, and control synthesis.
Details and publications
Capitalizing on recent developments in reinforcement learning in continuous time and space, we develop novel model-based reinforcement learning methods that vastly improve data efficiency and usefulness for online optimal feedback control.
Details and publications
Motivated by the need to adapt to changing models and reduce modeling errors in model-based control, we developed data-driven adaptive system identification methods to identify unknown parameters in the system model.
Details and publications
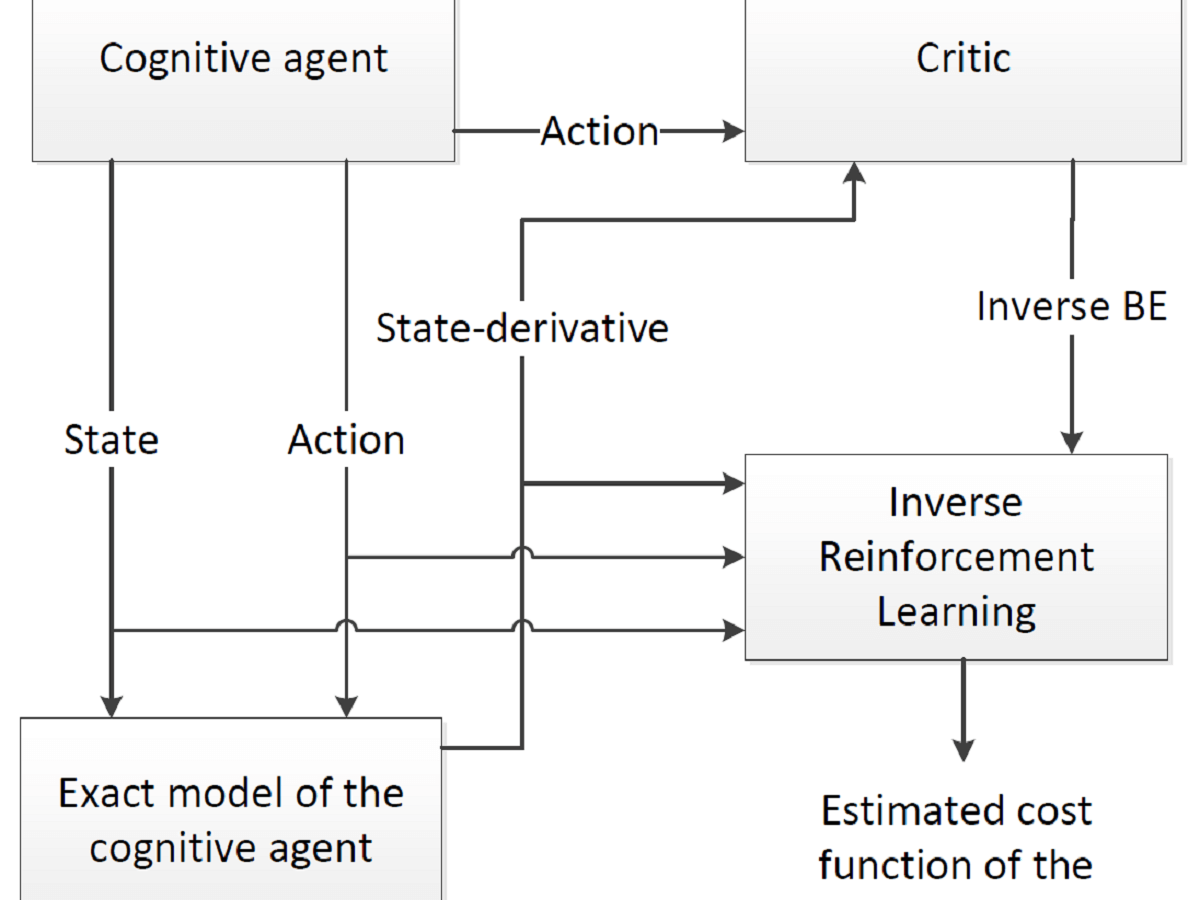
Based on the premise that a cost (or reward) function fully characterizes the intent of the demonstrator, we developed methods to learn the cost function from observations for linear and nonlinear uncertain systems.
Details and publications
Extensions of the LaSalle-Yoshizawa Theorem to nonsmooth nonautonomous systems and switched systems utilizing Filippov solutions of nonsmooth differential equations and nonstrict Lyapunov functions.
Details and publications
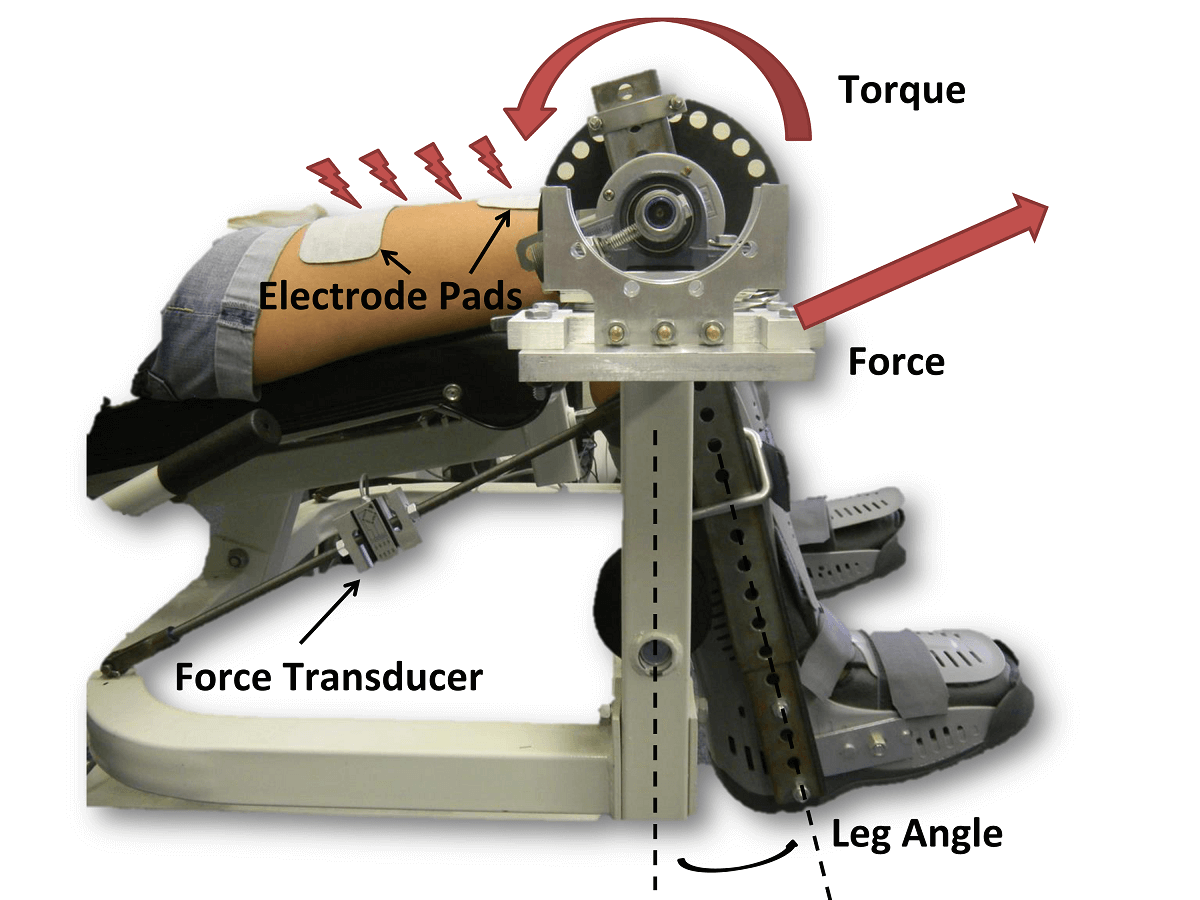
Potential uses of neuromuscular electrical stimulation for gait modifications leading to management of Osteoarthritis related pain.
Details and publications
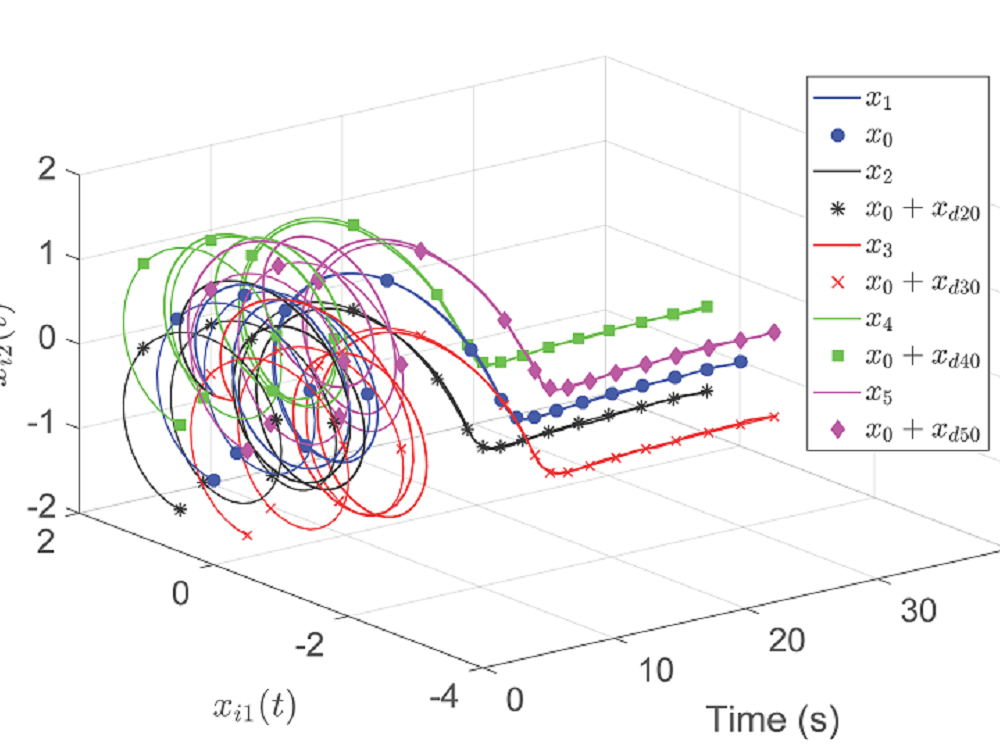
Data-driven model-based architectures to find feedback equilibrium solutions to differential games under relaxed excitation conditions.
Details and publications
Control methods for systems with known and unknown state and input delays.
Details and publications